
Golang之mutex #
互斥锁Mutex #
在Golang中用于表示互斥锁的是sync.Lock,其作用是保护临界区,确保任意时间只有一个goroutine能拿到锁。
正常模式&饥饿模式 #
为了保证公平性,Golang在v1.9的互斥锁版本中引入了饥饿模式与正常模式。
- 如果当前锁正在被持有,抢不到锁就会进入一个等待的队列,当锁被释放后,从这个队列的队头里唤醒一个goroutine(等待者),但是锁不会直接给这个等待者,而是必须与正在获取锁但还未进入等待队列的goroutine竞争这把锁,与刚唤醒的等待者相比,这个goroutine正持有CPU,所以获取到锁的概率较大。如果等待者抢锁失败,那么它就会被放回队列头部,如果它超过1ms都还没获取到锁,就从正常模式切换为饥饿模式。
- 在饥饿模式下,当锁释放后,锁会直接交给等待队列的第一个等待者,不必再与新来的goroutine竞争,新来的goroutine会直接加到等待队列的队尾。当满足以下两个条件时,饥饿模式将切换回正常模式。 (1)当前被唤醒的等待者获得锁后,发现队列只剩它自己一个了,那么切换回正常模式。 (2)当前被唤醒的等待者获得锁后,发现自己的等待时间不超过1ms,那么切换回正常模式。
在正常模式下,当前拥有CPU的goroutine比起等待队列里的goroutine有很大几率获得锁,这样可以避免协程上下文的频繁切换。但这样又会导致等待队列里的goroutine活活“饿死”,所以又必须有饥饿模式,保证等待已久的goroutine能够获取到锁,以保证公平性。
sync.Lock #
type Mutex struct {
state int32 //表示锁的状态,有锁定、饥饿、唤醒等状态
sema uint32 //表示信号量 用于实现mutex阻塞队列的定位
}
const (
mutexLocked = 1 << iota //1 state & 1 == 1 表示上锁状态
mutexWoken //2 state & 2 == 1 表示唤醒状态
mutexStarving //4 state & 4 == 1 表示饥饿状态
mutexWaiterShift = iota //3 state >> 3 获取等待者的数量
starvationThresholdNs = 1e6 //进入饥饿状态的阈值
)state字段总共占用32个bit,其中用前三位表示三个状态,后29个bit表示等待的goroutine个数。
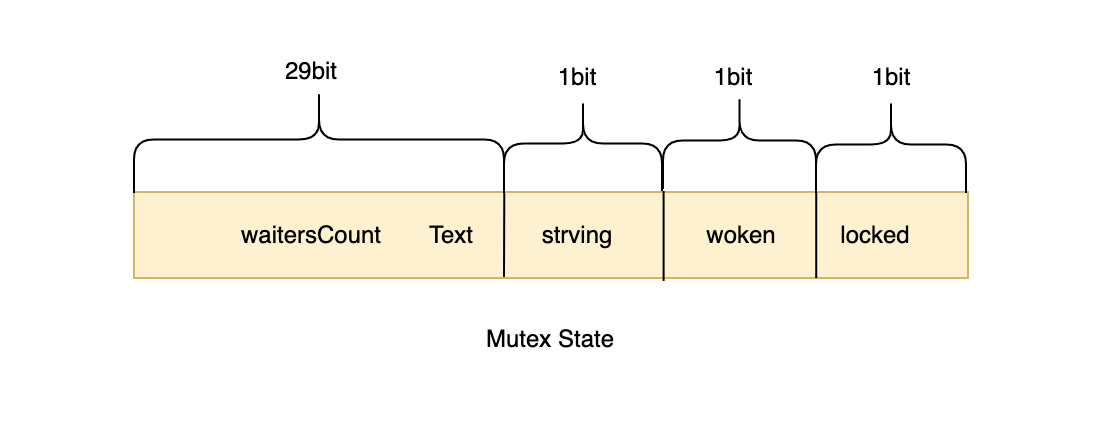
- locked: 表示互斥锁的锁定状态。
- woken: 表示从正常模式被唤醒。
- strving: 表示互斥锁进入饥饿状态。
- waiterCount: 表示互斥锁上等待goroutine的个数。
Lock()加锁过程 #
func (m *Mutex) Lock() {
// Fast path: grab unlocked mutex.
if atomic.CompareAndSwapInt32(&m.state, 0, mutexLocked) {
if race.Enabled {
race.Acquire(unsafe.Pointer(m))
}
return
}
// Slow path (outlined so that the fast path can be inlined)
m.lockSlow()
}通过CAS判断锁的当前状态,如果state的第一个位为0,那么说明此锁没有被占领,可以直接获取到锁。如果当前锁已被占领,则进入lockSlow()阶段。lockSlow()可以分为如下几个阶段:
- 判断当前Goroutine能否自旋
- 通过自旋转等待互斥锁的释放
- 计算互斥锁的最新状态
- 更新互斥锁的状态并获取锁
func (m *Mutex) lockSlow() {
var waitStartTime int64
starving := false
awoke := false
iter := 0
old := m.state
for {
//当前不为饥饿状态并 且 runtime_canSpin()返回true 才能进入自旋状态
if old&(mutexLocked|mutexStarving) == mutexLocked && runtime_canSpin(iter) {
if !awoke && old&mutexWoken == 0 && old>>mutexWaiterShift != 0 &&
atomic.CompareAndSwapInt32(&m.state, old, old|mutexWoken) {
awoke = true
}
//runtime_doSpin()自旋函数,会执行30次PAUSE指令,该指令只会占用CPU并消耗CPU时间
runtime_doSpin()
iter++
old = m.state
continue
}自旋是一种多线程同步机制,自旋的线程会一直占用CPU,直到达成某个条件。自旋可以防止CPU切换到其他线程上,避免了上下文切换,但线程长期自旋会使长期CPU空转,其他线程的任务没法执行。所以要进入自旋状态需要满足两个条件:
- state&(mutexLocked|mutexStarving)返回true,即锁处于正常模式。
- runtime_canSpin()返回true:
- 运行在多 CPU 的机器。
- 当前 Goroutine 为了获取该锁进入自旋的次数小于四次。
- 当前机器上至少存在一个正在运行的处理器 P 并且处理的运行队列为空
//如果没有进入自旋转状态
new := old
// Don't try to acquire starving mutex, new arriving goroutines must queue.
//如果不是饥饿模式,new标记为上锁状态
if old&mutexStarving == 0 {
new |= mutexLocked
}
//如果
if old&(mutexLocked|mutexStarving) != 0 {
new += 1 << mutexWaiterShift
}
// The current goroutine switches mutex to starvation mode.
// But if the mutex is currently unlocked, don't do the switch.
// Unlock expects that starving mutex has waiters, which will not
// be true in this case.
if starving && old&mutexLocked != 0 {
new |= mutexStarving
}
if awoke {
// The goroutine has been woken from sleep,
// so we need to reset the flag in either case.
if new&mutexWoken == 0 {
throw("sync: inconsistent mutex state")
}
new &^= mutexWoken
} TODO…